

| Robot Learning | Assistive Robotics | Education and Robotics | Space Flight Life Support Systems |
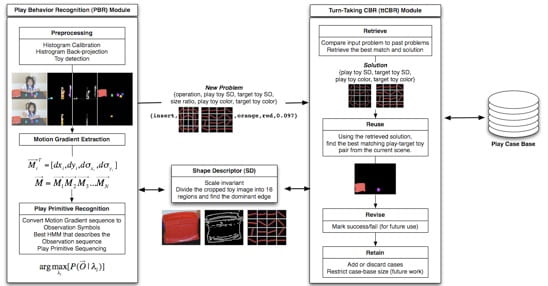
The objective of this research is to design task-learning policies (TLPs) for a robotic system that targets the exchange of task rules between humans and robots. This objective is achieved through a turn-taking application during a human-robot interaction where the two partners learn a task from each other and accomplish a shared goal. As a first step, a method to model human action primitives using a pattern-recognition technique is presented. Next, algorithms are developed to generate turn-taking strategies in response to human task behaviors. The main idea is to build a knowledge database that stores learned task cases, and to retrieve and adapt those experiences when similar tasks emerge. The contributions also include modeling TLP, deploying a physically embodied agent, and developing evaluation platforms.
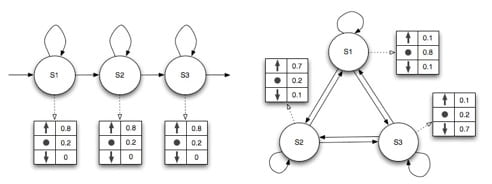
Human Task Behavior Modeling:
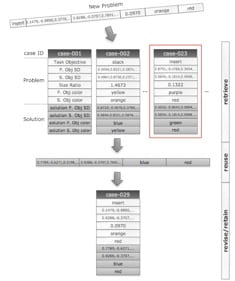
Case-based Turn-Taking Strategy:
Task-Learning Policies for Turn Taking in Human-Robot Interaction
Lead Engineers: Hae Won Park & Ayanna Howard

Related Publications
H.W. Park, A. Howard, “Understanding child’s play by sequencing play primitives and planning turn-taking strategy for a therapeutic robot playmate”, Pediatric Research Retreat: Frontiers in Pediatric Science, Jan. 2012.
H.W. Park, A. Howard, “Case-Based Reasoning for Planning Turn-Taking Strategy with a Therapeutic Robot Playmate,” IEEE Int. Conf. on Biomedical Robotics and Biomechatronics, Tokyo, Japan, Sept. 2010. ( pdf )
H.W. Park, A. Howard, “Understanding a Child’s play for Robot Interaction by Sequencing Play Primitives using Hidden Markov Models,” IEEE Int. Conf. on Robotics and Automation (ICRA), Anchorage, May 2010.
A. Trevor, H.W Park, A. Howard, C. Kemp, “Playing with Toys: Towards Autonomous Robot Manipulation for Therapeutic Play.” IEEE Int. Conf. on Robotics and Automation (ICRA), Kobe, Japan, May 2009.
A. Howard, S. Remy, C.H. Park, H.W. Park, and D. Brooks. “Intelligent robotics for assistive healthcare and therapy,” The Path to Autonomous Robots, G. Sukhatme (Ed), Springer Science, November 2008.
A. Howard, H.W. Park, C. Kemp, “Extracting Play Primitives for a Robot Playmate by Sequencing Low-Level Motion Behavior,” IEEE Int. Symp. on Robot and Human Interactive Communication (RO-MAN), pgs. 360-365, Munich, Germany, August 2008.