

| SnoMotes | Arctic Navigation | Robot Surveying | Underwater Robotics |
Robot Surveying System for Iceberg Observation
Lead Engineers: Richard Coogle, Ayanna Howard
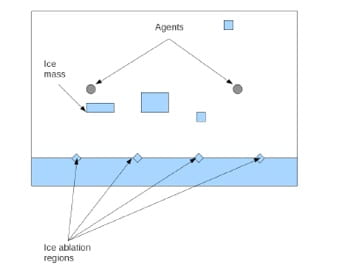
Ships that operate in polar regions continue to face the threat of floating ice sheets and icebergs generated from an ice ablation process. Systems have been implemented to track these threats, with varying degrees of success. In this research, we propose to address the iceberg tracking problem by re-casting it within a class of robotic, multiagent target observation problems. The focus in this new research is on minimizing the time an initial contact for newly generated targets is obtained, as opposed to obtaining a contact long after a target has been generated. Focusing on the initial contact time provides for the ability to enact early countermeasures.
Related Publications
R. Coogle, A. Howard, “The Iceberg Observation Problem: Using Multiple Agents to Monitor and Observe Ablating Target Sources,” IEEE Int. Conf. on Systems, Man, and Cybernetics, Manchester, UK, Oct. 2013
Robot Survey System for Environmental Monitoring (Retired 2013)
Lead Engineers: Lonnie Parker, Ayanna Howard
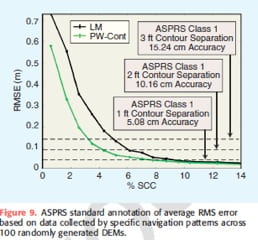
Environmental monitoring of spatially-distributed geo-physical processes (e.g., temperature, pressure, or humidity) requires efficient sampling schemes, particularly, when employing an autonomous mobile agent to execute the sampling task. Many approaches have considered optimal sampling strategies which specialize in minimizing estimation error, while others emphasize reducing resource usage, yet rarely are both of these performance parameters used concurrently to influence the navigation. This research focused on how a spatial estimation process and resource awareness could be integrated together to generate an informed navigation policy for collecting useful measurement information.
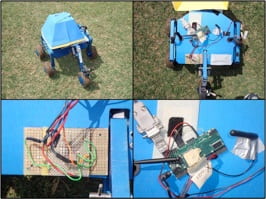
Field tests were conducted in Juneau, AK where accelerometer measurements were collected to confirm orientation information of a single HumAnS SnoMote on Mendenhall and Lemon Creek glaciers. The system was also validated using an autonomous ground vehicles with a low-cost sensor suite composed of MEMS accelerometers to obtain critical orientation information.


Related Publications
L. Parker, R. Coogle, A. Howard, “Estimation-Informed, Resource-Aware Robot Navigation for Environmental Monitoring Applications,” IEEE Int. Conf. on Robotics and Automation (ICRA), Karlsruhe, Germany, May 2013.
S. Williams, L. Parker, A. Howard, “Terrain Reconstruction of Glacial Surfaces via Robotic Surveying Techniques,” IEEE Robotics and Automation Magazine, Vol. 10(4), pgs. 59-71, December 2012.
H. Mei, L. T. Parker, A. M. Howard, “Real Conversion of GIS Contour Maps into Surface Disigital Elevation Models for Robotic Surveying”, IEEE Int. Conference on Systems, Man, and Cybernetics, Anchorage, AK, Oct. 9-12, 2011. ( pdf )
L. T. Parker, A. M. Howard, “Adaptive Robot Navigation Protocol for Estimating Variable Terrain Elevation Data”, IEEE Int. Conference on Systems, Man, and Cybernetics, Anchorage, AK, Oct. 9-12, 2011. ( pdf )