
 |
|||
|
About the Walking Robot Our first version was a simple walking robot created to test our robotic sensor networks. Therefore, the work done on future iterations could be focused on the hardware of the robots. In order to bring us to our future goal: creating an all-terrain, multi-directional exploratory vehicle. CAD Images
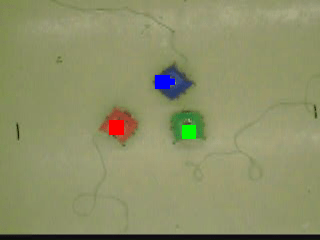
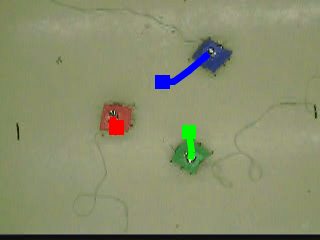
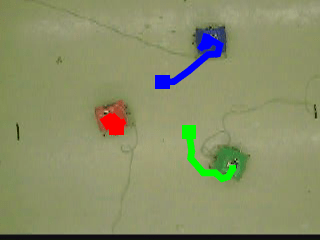
Network Trajectory
|
|||
| About | Perception and Reasoning | Human-System Interaction | Space and Field Robotics | People | Home | |||



<![CDATA[
]]>