
 |
|||
|
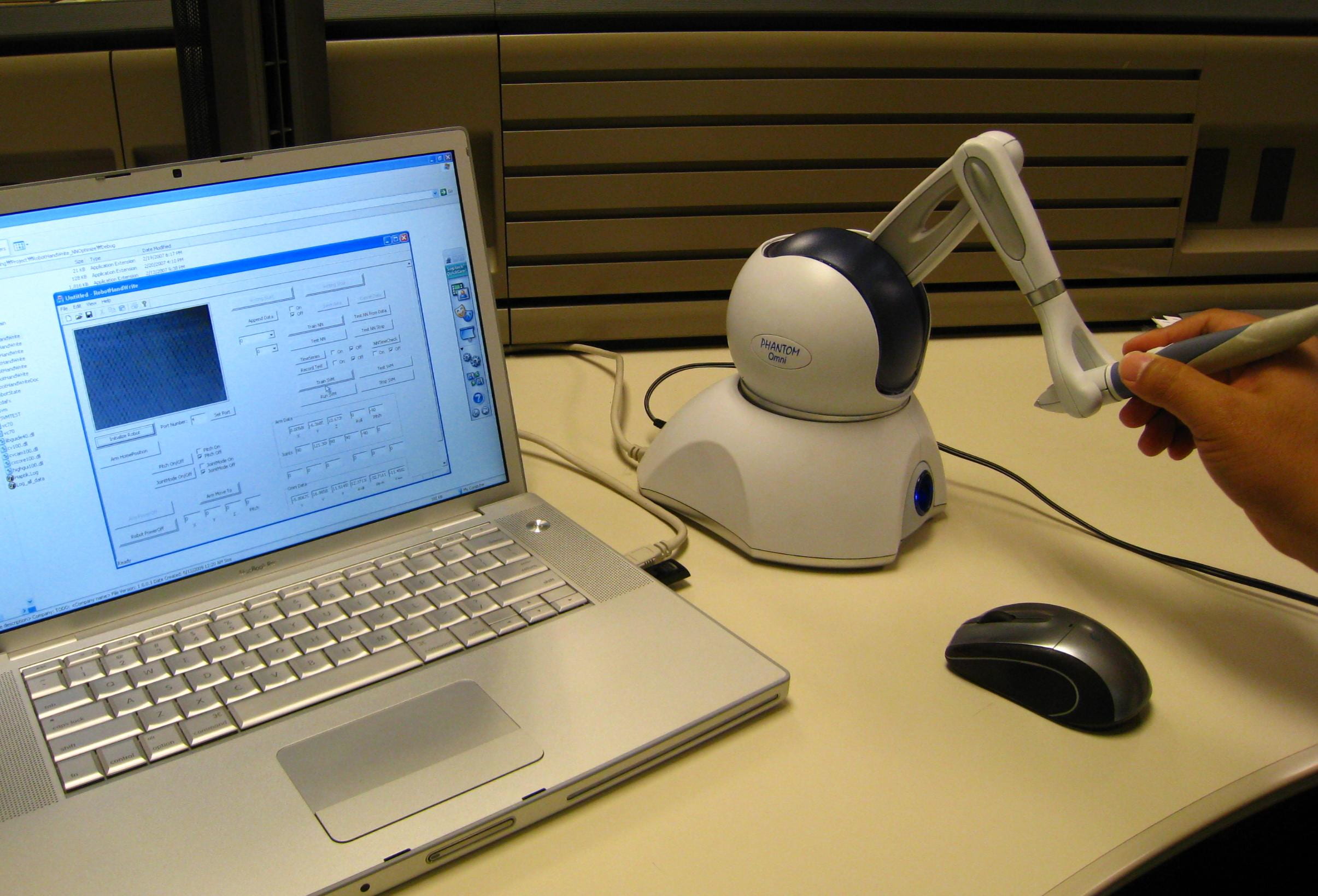
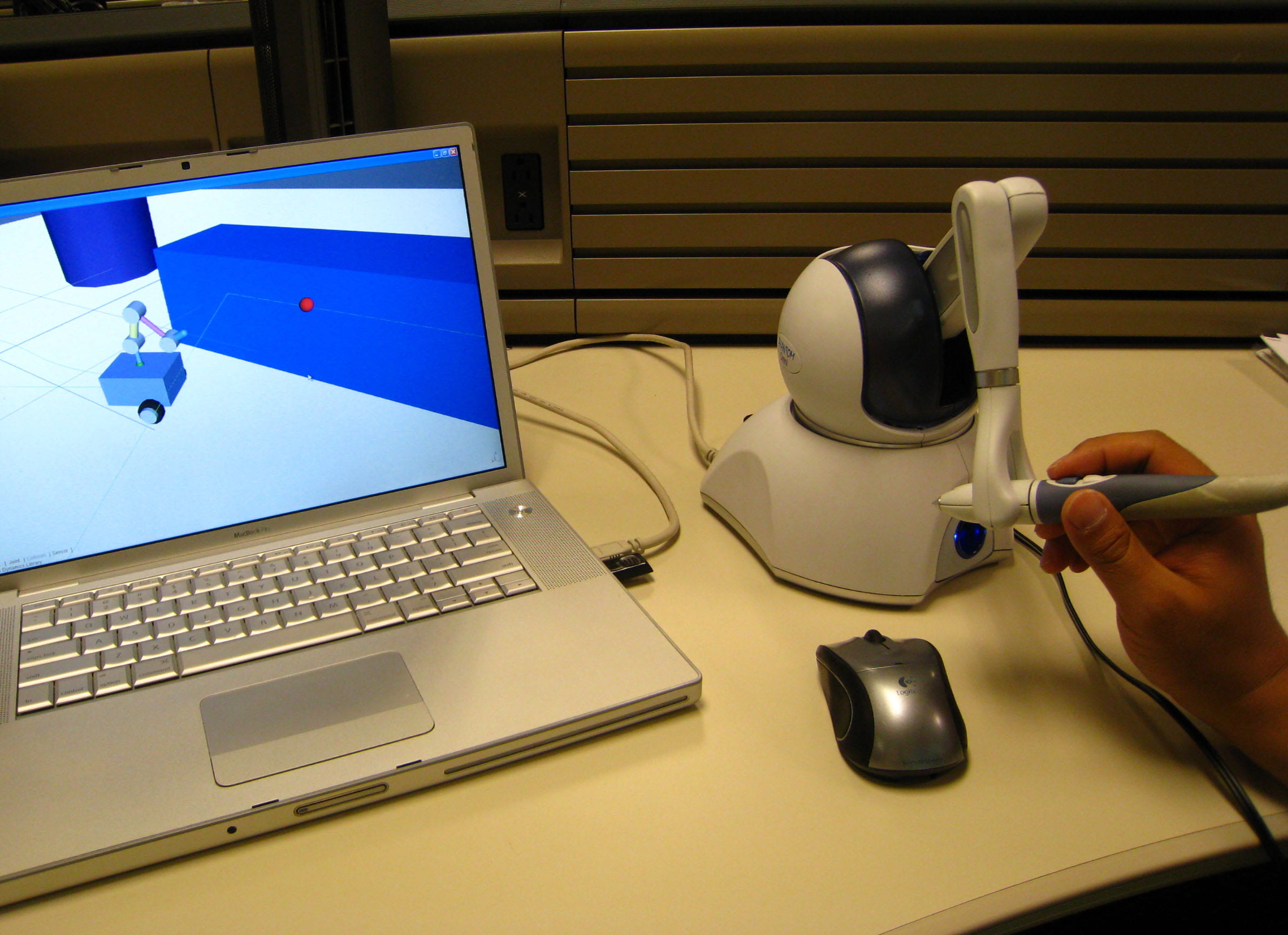
Learning from Teleoperation Robots are rolling out of the research labs and walking, crawling and One of the challenges in the robotic learning portion of this process is This research seeks to uncover quantitative metrics which can be generated Omni + Pioneer
Omni + Simulation
|
|||
| About | Perception and Reasoning | Human-System Interaction | Space and Field Robotics | People | Home | |||


<![CDATA[
]]>