
 |
|||
|
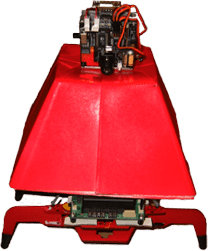
About the SnoMotes I & II SnoMotes I To endow a rover with an inherent all-terrain drive system for navigation in Arctic environments, a 1/10 scale snowmobile chassis was selected for our prototype platform. The platform was modified to include an ARM-based processor running a specialized version of Linux. The motherboard offered several serial standards for communication, in addition to wifi and bluetooth. A daughterboard provided an ADC unit and PWM outputs for controlling servos. The drive system was modified to accept PWM motor speed commands, and the steering control was replaced with a high-torque servo. For ground truth position logging, a GPS unit connects to the processor via the bluetooth interface, while robot state and camera images are sent directly to an external control computer via the wifi link. To simulate the science objectives of a mobile sensor network, a weather- oriented sensor suite was added to the rover. The deployed instrument suite includes sensors to measure temperature, barometric pressure, and relative humidity.
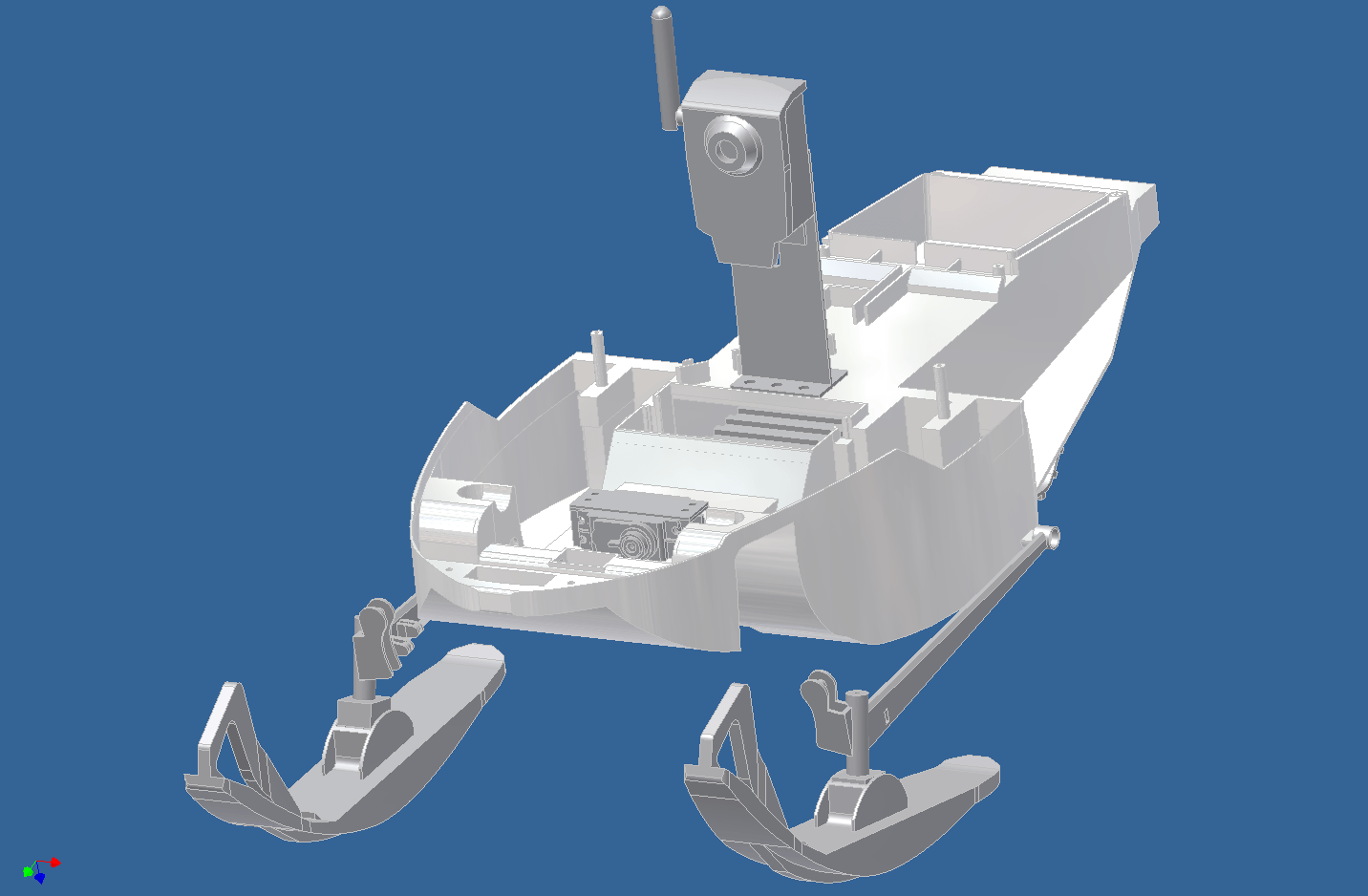
SnoMotes II
The main reason tracked vehicles are used for snow traversal is the large
|
|||
| About | Perception and Reasoning | Human-System Interaction | Space and Field Robotics | People | Home | |||





<![CDATA[
]]>