
 |
|||
|
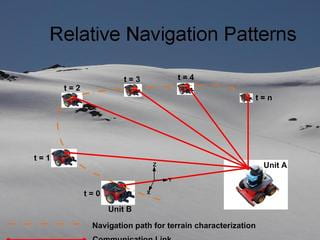
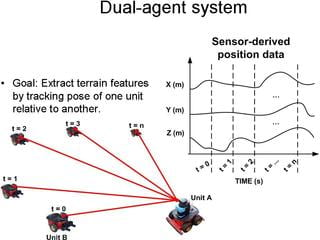
Multi-Agent Terrain Characterization Robotic Survey System This work encompasses the theme of a robotic surveyor system capable of traversing harsh, variable terrain and intelligently discerning the optimal navigation strategy for achieving representative coverage. The coverage will enable earth scientists to extract more information about various test sites than is currently allowed and improve safety by removing the human from potentially dangerous areas of interest. Traditional surveying techniques typically employ in situ (on ground) and remote (satellite) measurements, however, a significant amount of error is introduced at each level. This work has two benefits: 1) to minimize measurement error by leveraging satellite imagery in order to better influence the autonomous behavior of a ground-based robotic system and 2) to expand the allowable area of testing during field campaigns. Both of these benefits drive the goal of obtaining better representative coverage of terrain, improving the resolution of information provided to the earth science community. The primary contribution of this research is identifying what design considerations must be considered when deploying a system of this type for such a purpose. Initial field tests have been conducted in Juneau, AK where accelerometer measurements were collected to confirm orientation information of a single HumAnS SnoMote on Mendenhall and Lemon Creek glaciers. Currently, I am outfitting multiple unmannded ground vehicles with a low-cost sensor suite composed of MEMS accelerometers to obtain critical orientation information. Robotic Surveying
|
|||
| About | Perception and Reasoning | Human-System Interaction | Space and Field Robotics | People | Home | |||
<![CDATA[
]]>