

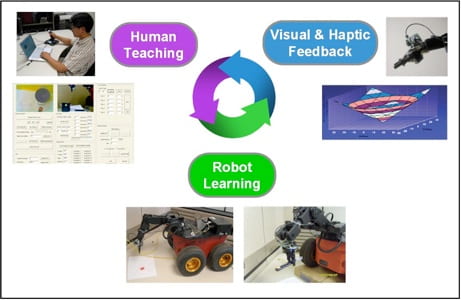
Robots are rolling out of the research labs and walking, crawling and flying into our homes. As such the new description for a robot owner is changing. For example from the researcher or the science enthusiast, to the home make who needs a little help with the windows. To ease the challenge of programming robots for the new robot owner/operator learning from demonstration has been proposed. This form of features the operator demonstrating what they would like the robot do and the robot learning how to make it happen.
One of the challenges in the robotic learning portion of this process is that many robot’s do not yet have the ability to actively engage in the process. It is often the case that robots passively learn based on information provided to them. They are not equipped to perform meta-analysis about their experience, or at least to do so in a short enough time for it to be relevant in this learning process.
This research seeks to uncover quantitative metrics which can be generated by these robotic students. Such metrics can enable the robot to perform tasks like determining how much more training time it needs to master a task, assessing whether a particular set of instruction is likely to be helpful in the learning process, or even to determining if the provided instruction is coming from someone who knows what they are doing.
Paradigm:
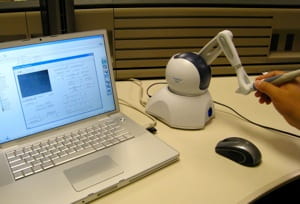
Omni + Pioneer:
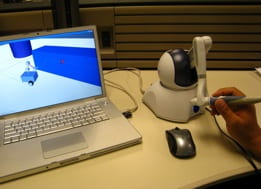
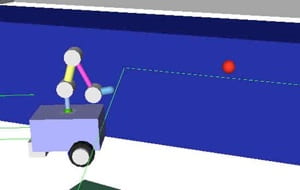
Omni + Simulation:
Learning from Teleoperation
Lead Engineers: Chung Hyuk Park & Ayanna Howard
Related Publications
C.H. Park, A. Howard, “Visualize Your Robot with Your Eyes Closed: A Multi-modal Interactive Approach Using Environmental Feedback,” IEEE Int. Conf. on Robotics and Automation (ICRA), Shanghai, China, May 2011.
C.H. Park, A. Howard, “Towards Real-Time Haptic Exploration using a Mobile Robot as Mediator,” 2010 Haptics Symposium, Cambridge, MA, March 2010.
C.H. Park, J.W. Yoo, A. Howard, “Transfer of Skills between Human Operators through Haptic Training with Robot Coordination,” IEEE Int. Conf. on Robotics and Automation (ICRA), Anchorage, AK, May 2010.
A. Howard, S. Remy, C.H. Park, H.W. Park, and D. Brooks. “Intelligent robotics for assistive healthcare and therapy,” The Path to Autonomous Robots, G. Sukhatme (Ed), Springer Science, November 2008.
C.H. Park, A. Howard, “Vision-based Force Guidance for Improved Human Performance in a Teleoperative Manipulation System,” IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), CA, Oct. 2007.
A. Howard, C.H. Park, “Haptically Guided Teleoperation for Learning Manipulation Tasks,” Robotics: Science and Systems: Workshop on Robot Manipulation, Atlanta, GA, June 2007.


| Robot Learning | Assistive Robotics | Education and Robotics | Space Flight Life Support Systems |