


Current research focuses on the development of a situation-based human-automation integration method for the assessment and operation of heterogeneous dynamic systems (HDS), composed of humans, physical systems, and computer agents, which behavior depends on their situation. The main challenge consists in making use of computational intelligence methods to develop numerical tools and criteria consistent with control systems theory and principles in cognitive engineering to enable the integration and safe operation of these systems. Fields of application include physical and cyber security systems, smart grid operation, bioengineering systems and life support, disaster monitoring and recovery, epidemic monitoring and control, intelligent transportation systems, financial and investment services, and tactical and operational battlefield command and control systems. The purpose is to contribute to the methodological development of situation-based and user-centered design approaches for the integration of HDS.
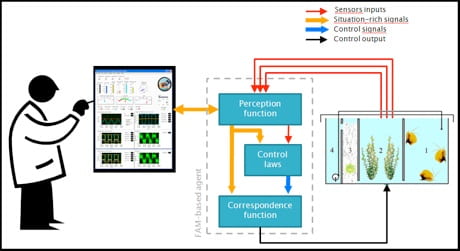
In this project, we make use of a small-scale aquatic habitat for experiments relevant to the integration, automation, and operation of bioregenerative life support systems (BLSS), which make use of biological processes to transform biological by-products back into consumables. These systems grow in importance with the development of long-duration human space exploration systems. The aquatic habitat is used as a working analogy to a space habitat as snails or other invertebrates (consumers) are to astronauts. BLSS combine physico-chemical and biological processes with the purpose of improving the autonomy of man-made habitats and the life quality of their living organisms. These processes require energy and time to transform wastes and by-products back into consumables. Consequently, their maintenance may impose considerable workload to human operators. In addition, the slow response of BLSS and their demand of human attention creates vulnerabilities that, unattended, may translate into human errors, performance deterioration, and failures. By properly combining sensor information, computational resources, and user-interfaces, this work develops a methodology to integrate humans and automation toward the proper and safe operation of BLSS, among other bioengineering systems, and HDS.
For more information please visit http://www.astrodrayer.com/gt-research
Space Flight Life Support Systems
Lead Engineers: Gregorio Drayer, Ayanna Howard
Related Publications
Drayer, G. and Howard, A. “A Granular Approach to the Automation of Bioregenerative Life Support Systems that Enhances Situation Awareness.” 2012 IEEE Conference on Cognitive Methods in Situation Awareness and Decision Support (CogSIMA), upcoming publication on 6-8 March 2012, New Orleans, LA, USA.
Drayer, G. and Howard, A. “A FAM-based Switched Control Approach for the Automation of Bioregenerative Life Support Systems.” 41st AIAA International Conference on Environmental Systems (ICES), 17-21 July 2011, Portland, Oregon.
Drayer, G. and Howard, A. “Modeling, Design and Simulation of a Reconfigurable Aquatic Habitat for Life Support Control Research.” 41st AIAA International Conference on Environmental Systems (ICES), 17-21 July 2011, Portland, Oregon.
| Robot Learning | Assistive Robotics | Education and Robotics | Space Flight Life Support Systems |