

Climate change is one of the major concerns of the scientific community. As such, scientists are always looking for new ways to collect weather data to help model and predict the impact of our society on the global climate. Specifically, weather data collected from arctic regions is considered valuable, as glacial regions are more sensitive to the effects of climate change. Recently, scientists have been considering deploying multiple robotic weather stations to Greenland or Antarctica to aid in this data collection.
For such a robotic system to be viable, each rover must be able to navigate to a desired location without relying on a human operator. However, glacial terrains present a variety of hazards apart from the obvious temperature extremes. Hard-packed snow dunes and softer snow drifts present steep inclines that must be overcome, vertical cracks in the ice sheet can easily swallow a small rover, and varying lighting conditions in the all-white environment make detecting these hazards difficult.
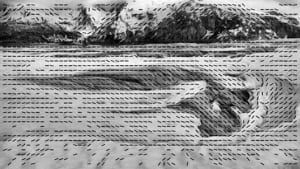
Nonetheless, current research is focused on developing a vision-based navigation system for arctic robots. Techniques for amplifying subtle terrain texture have proven effective at uncovering potential hazards, and methods for extracting visual landmarks in the snow-covered terrain have enabled rovers to track their progress towards their goal. Currently, methods are being explored to allow the rovers to create a ‘mental’ 3-D model the terrain. With this model the robots can plan efficient routes to their goal that minimizes traversal through treacherous terrain.
Arctic Navigation
Lead Engineers: Stephen Williams & Ayanna Howard
| SnoMotes | Arctic Navigation | Robot Surveying |



<![CDATA[]]>
Related Publications
S. Williams, A. Howard, “Horizon Line Estimation In Glacial Environments Using Multiple Visual Cues,” IEEE Int. Conf. on Robotics and Automation (ICRA), Shanghai, China, May 2011.
S. Williams, L. Parker, A. Howard, “Calibration and Validation of Earth-observing Sensors using Deployable Surface-based Sensor Networks,” IEEE Journal of Selected Topics in Earth Observations and Remote Sensing, to appear 2010.
S. Williams, D. Brooks, A. Howard, “Robot Vision for Science-Driven Navigation in Challenging Arctic Environments,” Robot Vision: New Research, T. Matsuda (Ed), Nova Science, 2009.
S. Williams, A. Howard, “Towards Visual Arctic Terrain Assessment,” 7th Int. Conf. on Field and Service Robotics, Cambridge, MA, July 2009.
S. Williams, S. Remy, A. Howard, “3-D Simulations for Testing and Validating Robotic-Driven Applications for Exploring Lunar Pole,” AIAA Infotech@Aerospace 2010, Atlanta, GA, April 2009.
S. Williams, M. Hurst, A. Howard, “Development of a Mobile Arctic Sensor Node for Earth-Science Data Collection Applications,” AIAA Infotech@Aerospace 2010, Atlanta, GA, April 2009.
S. Williams, A. Howard, “A Terrain Slope Estimation Technique for Natural Arctic Environments,” IEEE Int. Conf. on Robotics and Automation (ICRA), Pasadena, CA, May 2008.
S. Williams and A. Viguria, A. M. Howard, “A robotic mobile sensor network for achieving scientific measurements in challenging environments,” Earth Science Technology Conference (ESTC), Wasington, DC, June 2008.